- انتخاب شما آغاز تعهد ماست . . .
- تهران: 02176490358 - 09120613870
- مشهد: 05138554285 - 09155177027
- info@PersianCode.net


اصلاح تصویر و حذف نویز در متلب 2
تابع Wiener و روش آماری فیلتر NSPR در متلب
آموزش برنامه نویسی در متلب12
نوشته ها :
1- حذف نویز با فیلترهای مکان
2- تابع Wiener Filtering
3- روش آماری فیلتر NSPR
4- تخمین زدن با روش آماری واریانس
5- تابع deconvwnr
6- فراخوانی به روش J = deconvwnr ( I , PSF , NSR )
7- فرا خوانی به روش J = deconvwnr ( I , PSF , NCORR , ICORR )
چگونگی اصلاح تصویر و حذف نویز و تابع Wiener Filtering و روش آماری فیلتر NSPR در متلب را بررسی میکنیم .
حذف نویز با فیلترهای مکان :
با افزودن نویز به خانواده ای از تصاویر میتوانیم با ایجاد یک سیستم فازی با کمترین خطا تصویر را بهبود دهیم در این فیلتر ها تصویر ورودی نویز دار و خروجی تصویر اصلی است .
با شناختن پایه های فیلترینگ به ترکیب آن می پردازیم .
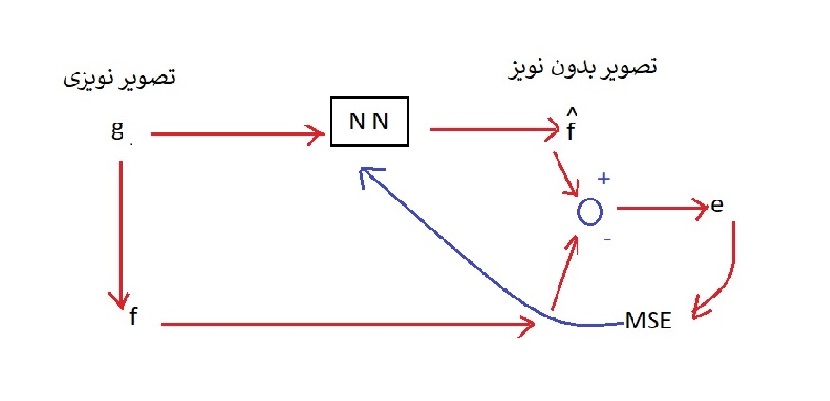
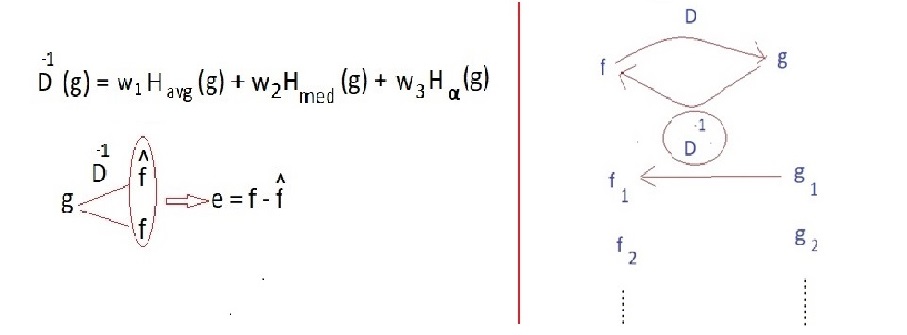
پایه عملکرد را MSE قرار میدهیم و با توجه به آن ساختار عصبی شبکه را تغییر میدهیم .
این روش نتیجه مطلوبی در حذف نویزها ندارد .
به بررسی روش های قوی تری در باز سازی تصویر در حوزه فرکانس میپردازیم .
تصویر ورودی متفاوت تغییرات متفاوتی را به همراه دارد .
یکی از راه ها Wiener Filtering است .
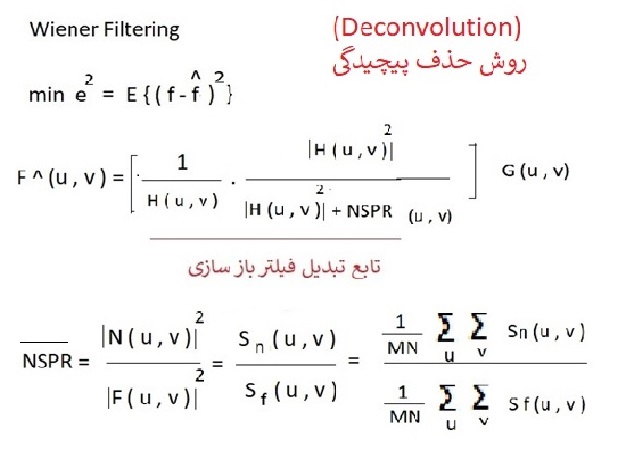
با Wiener Filtering به کمترین خطا میرسیم .
چون تابع هدف( E )در مکان راحت به نتیجه نمیرسد حل آن را در حوزه فرکانس انجام میدهیم .
F درNSPR مجهول است برای یافتن آن فرمول را به توابعی که داریم تبدیل میکنیم تا شدت نسبی را بیابیم .
برای نمایش NSPR ثابت نماد خط بالای آن را بر میداریم .
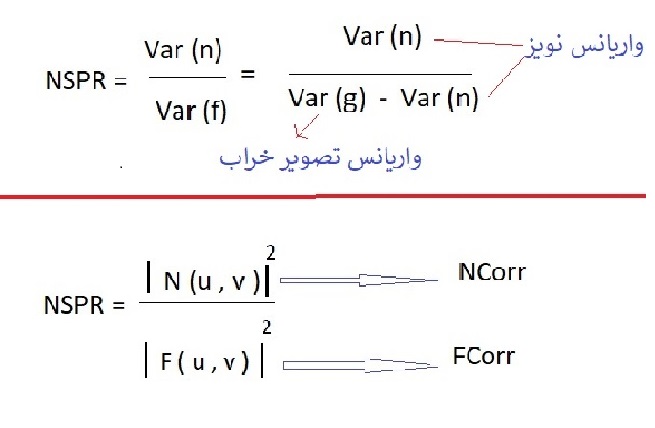
این مدل NSPR از دید آمار میگوید .
PSF ماتریس وزنی تبدیل مکانی است .
میزان نویز به سیگنال را NSR نمایش میدهد .
رابطه نویز را با نویز NCORR .
رابطه تصویر با تصویرICORR .
بررسی حذف نویز :
-
Clc ; Clear ; Close all ; % % Read Image f =imread ( ‘ Cameraman . tif ‘ ) ; f = im2double (f) ; % % Apply Motion Filter MotionLength = 7 ; MotionAngle = 45 ; PSF = fspecial ( ‘ motion ‘ , MotionLength , MotionAngle ) ; g1 = imfilter ( f , PSF) ; % % Add Noise NoiseMean = 0 ; NoiseVar = 0 . 01 ; g2 = imnoise ( g1 , ‘gaussian ‘ , NoiseMean , NoiseVar ) ; % % Wiener Deconvolution % % Results figure ; subplot ( 2 , 2 , 1 ) ; imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot ( 2 , 2 , 2 ) ; imshow ( g1) ; title ( ‘ Blurred Image ‘ ) ; subplot ( 2 , 2 , 3) ; imshow ( g2) ; title ( ‘ Blurred and Noisey Image ‘ ) ;
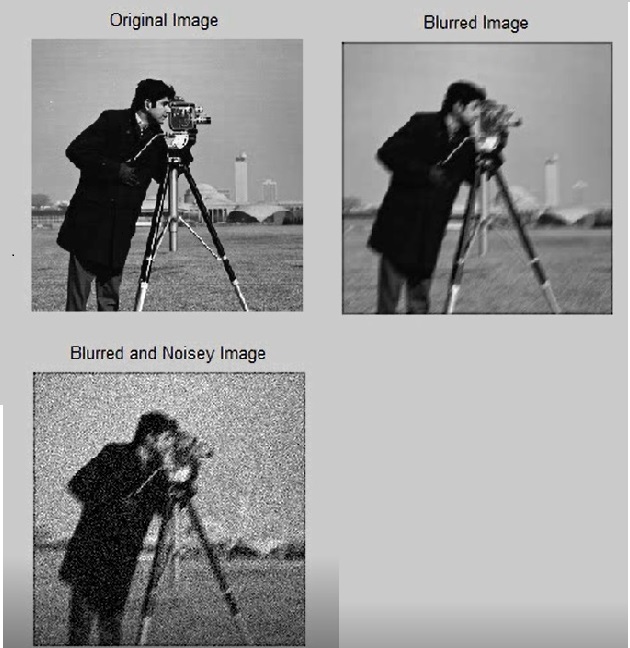
با دستور J = deconvwnr ( I , PSF , NSR ) تصویری با 45 درجه چرخش رابا فرض داشتن PSF بازیابی و نویز را حذف میکنیم .
بررسی با روش آماری واریانس :
-
% % Wiener Deconvolution % ImageVar = Var (f(:)) ; % NSPR = NoiseVar ; Fhat 1 = deconvwnr (g2 , PSF , 0 ) ; % % Results figure ; subplot ( 2 , 3 , 1 ) ; imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot ( 2 , 3 , 2 ) ; imshow ( g1) ; title ( ‘ Blurred Image ‘ ) ; subplot ( 2 , 3 , 3) ; imshow ( g2) ; title ( ‘ Blurred and Noisey Image ‘ ) ; subplot ( 2 , 3 , 4) ; imshow ( fhat1 ) ; title ( ‘ Recovered Image ( NPSR = 0 ) ‘ ) ;
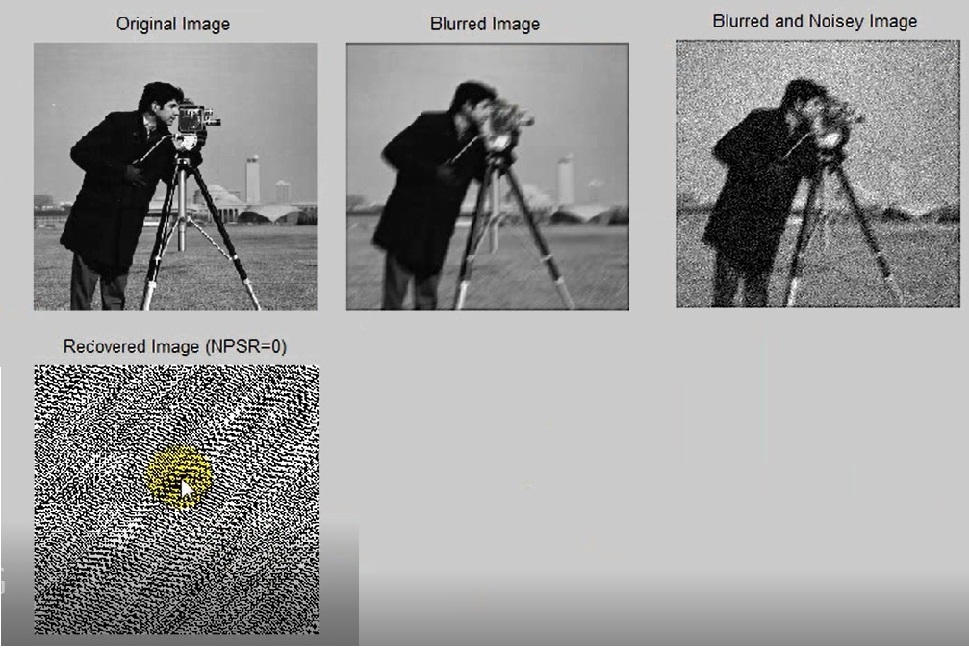
بدون نویز کارایی ندارد چون تصویر مخدوش میشود .
از NSPR استفاده میکنیم .
-
% % Add Noise NoiseMean = 0 ; NoiseVar = 0 . 001 ; g2 = imnoise ( g1 , ‘gaussian ‘ , NoiseMean , NoiseVar ) ; % % Wiener Deconvolution NSPR1 = 0 ; Fhat 1 = deconvwnr (g2 , PSF , NSPR1 ) ; ImageVar = Var (f (:) ) ; NSPR2 = NoiseVar / ImageVar ; Fhat2 = deconvwnr (g2 , PSF , NSPR2 ) ; % % Results figure ; subplot ( 2 , 3 , 1 ) ; imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot ( 2 , 3 , 2 ) ; imshow ( g1) ; title ( ‘ Blurred Image ‘ ) ; subplot ( 2 , 3 , 3) ; imshow ( g2) ; title ( ‘ Blurred and Noisey Image ‘ ) ; subplot ( 2 , 3 , 4) ; imshow ( fhat1 ) ; title ( ‘ Recovered Image ( NPSR = 0 ) ‘ ) ; subplot ( 2 , 3 , 5) ; imshow ( fhat2 ) ; title ( [ ‘ Recovered Image ( NPSR = ‘ num2str ( NSPR2) ‘ ) ‘ ] ) ;
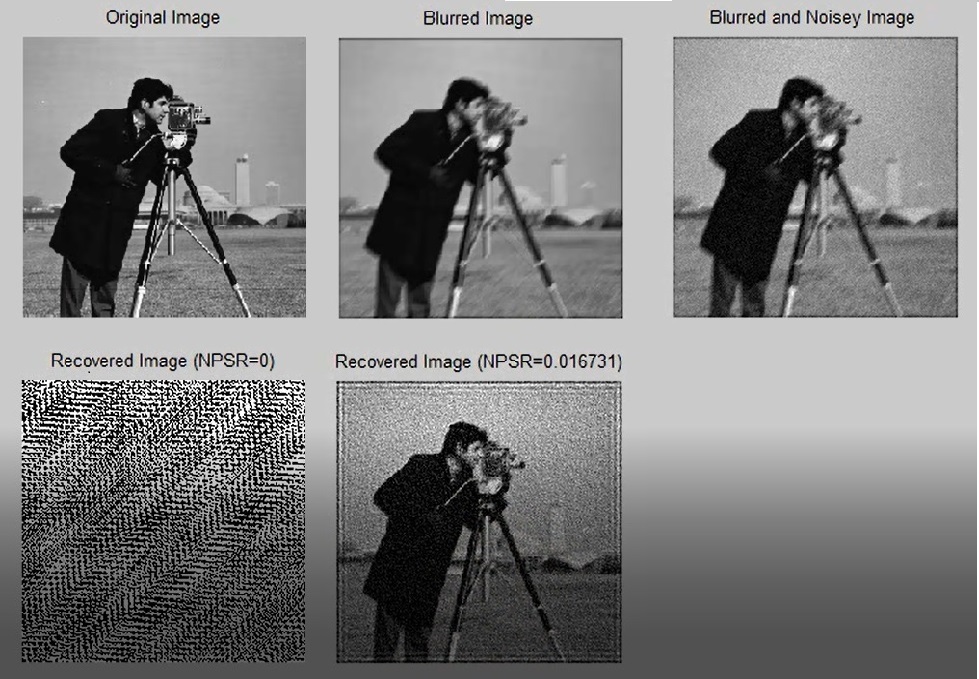
حرکت 45 درجه ای تصویر را با ده برابر کم کردن واریانس نویزی بی اثر کردیم و به وضوح تصویر اصلی رسیدیم حالا به برطرف کردن اثر نویز میپردازیم .
-
% % Wiener Deconvolution NSPR1 = 0 ; Fhat 1 = deconvwnr (g2 , PSF , NSPR1 ) ; ImageVar = Var (f (:) ) ; NSPR2 = NoiseVar / ImageVar ; Fhat2 = deconvwnr (g2 , PSF , NSPR2 ) ; NSPR3 = 0 .05 ; Fhat3 = deconvwnr (g2 , PSF , NSPR3 ) ; % % Results figure ; subplot ( 2 , 3 , 1 ) ; imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot ( 2 , 3 , 2 ) ; imshow ( g1) ; title ( ‘ Blurred Image ‘ ) ; subplot ( 2 , 3 , 3) ; imshow ( g2) ; title ( ‘ Blurred and Noisey Image ‘ ) ; subplot ( 2 , 3 , 4) ; imshow ( fhat1 ) ; title ( ‘ Recovered Image ( NPSR = 0 ) ‘ ) ; subplot ( 2 , 3 , 5) ; imshow ( fhat2 ) ; title ( [ ‘ Recovered Image ( NPSR = ‘ num2str ( NSPR2) ‘ ) ‘ ] ) ; subplot ( 2 , 3 , 6) ; imshow ( fhat3 ) ; title ( [ ‘ Recovered Image ( NPSR = ‘ num2str ( NSPR3) ‘ ) ‘ ] ) ;

بیشتر نویزها حذف شد ولی تصویر تار شد .
اجرای فراخوانی با روش J = deconvwnr ( I , PSF , NCORR , ICORR ) :
اول با پیدا کردن طیف نویز محاسبه میکنیم .
-
SN = abs (fft2 (g2 – g1)) . ^2 ; NCORR = fftshift (real (ifft2 (SN)) ; SF = abs (fft2(f)) . ^2 ; FCORR = fftshift (real (ifft2 (SF))) ; NSPR = NCORR . / FCORR ; Fhat3 = deconvwnr ( g2 , PSF , NCORR , FCORR ) ;
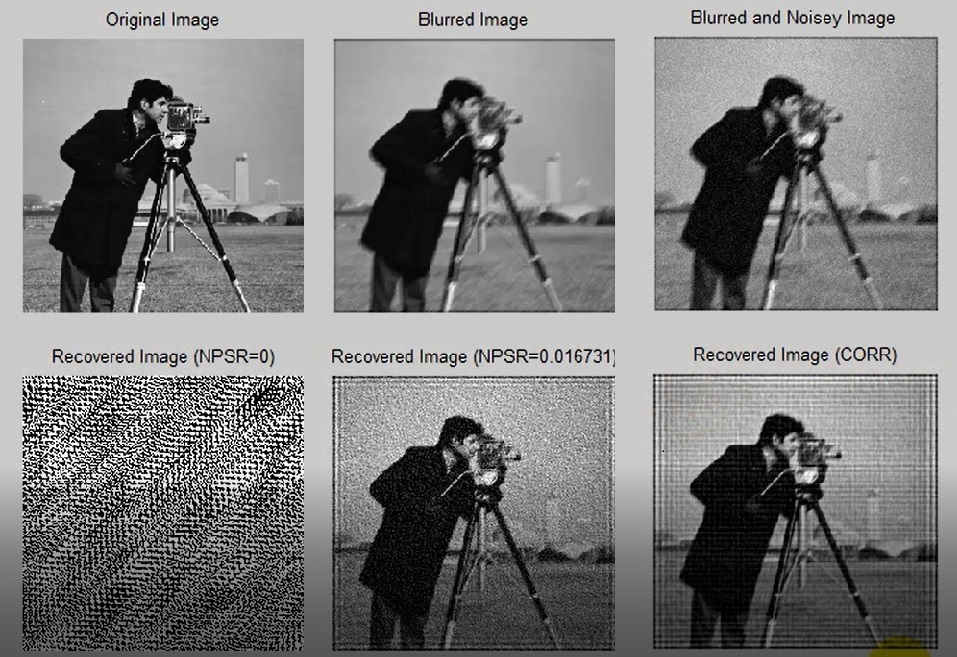
همبستگی سیگنال در نقاط مختلف تصویر متفاوت است حالت کُریلیشن با خود .
از نویز گیری برای شفاف سازی پلاک خودرو جهت پلاک خوان پارکینگ در نرم افزار پارکینگ و کنترل تردد خودرو استفاده میگردد.
وضوح تصویر بالا ست برای کم کردن نویز اطراف تصویر تابع J = edgetaper (I , PSF) وارد عمل میشود .
-
PSF2 = fspecial (‘gaussian ‘ , 60 , 10 ) ; Fhat4 = edgetaper (fhat3 , PSF2 ) ;
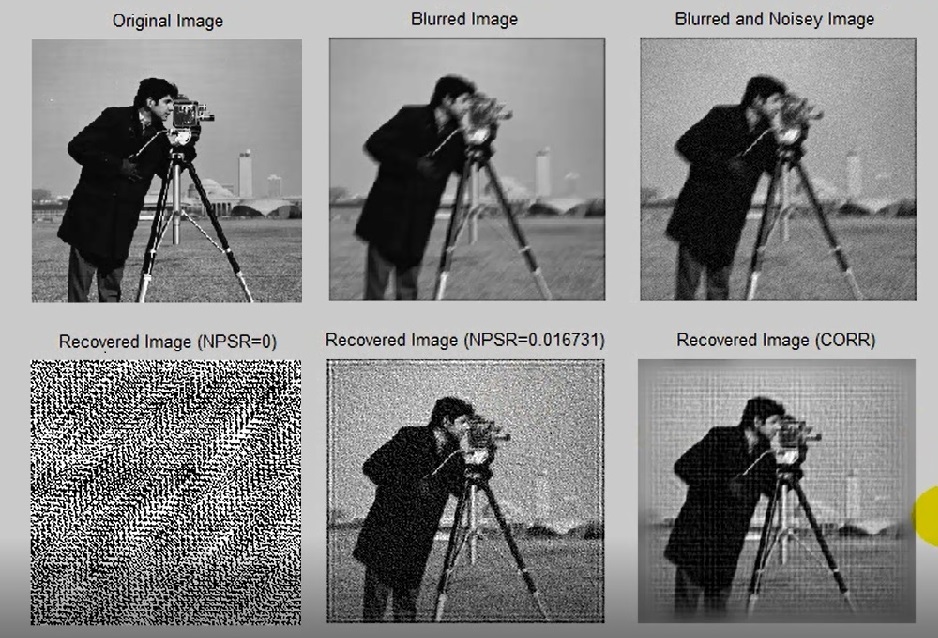
با این تابع نویز حواشی هم کم شد و بیشترین شباهت به تصویر اصلی را دارد .
تابع Wiener و فیلتر NSPR در متلب نتایج متنوعی در اختیار ما میگذارد .
