- انتخاب شما آغاز تعهد ماست . . .
- تهران: 02176490358 - 09120613870
- مشهد: 05138554285 - 09155177027
- info@PersianCode.net


تبدیل تابع مکانی به تابع فرکانسی در متلب
متریک ها و ماتریس ضرایب فیلتر مکانی در متلب
آموزش برنامه نویسی در متلب 10
نوشته ها :
1- تبدیل تابع مکانی به تابع فرکانسی
2- فیلتر در حوزه فرکانس
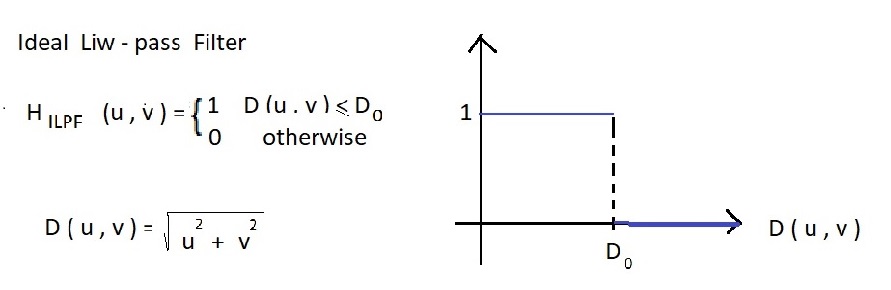
3- تابع بر اساس فاصله از مبدا
4- مقایسه فیلتر بالا گذر و پایین گذر
5- با انواع متریک ها آشنا میشویم
6- آشنایی با ماتریس ضرب داخلی
7- آشنایی با ماتریس ضرایب فیلتر مکانی
تبدیل یک تابع مکانی به یک تابع فرکانسی در متلب :
1- تبدیل مستقیم از fft2 ماتریس مکان و با fft2 تصویر ضرب میکنیم و از حاصل ضربشان معکوس تبدیل فوریه میگیریم .
2- از طریق فیلتر Freqz2 متلب که دقت و سرعت بیشتری از fft2 دارد .
-
Clc ; Clear ; Close all ; f = imread ( ‘ rice . png ‘ ) ; f = im2double ( f ) ; h = fspecial ( ‘ motion ‘ , 10 , 45 ) ; H1 = freqz2 ( h , size ( f , 1 ) , size ( f , 2 ) ) ; H = ifftshift ( H1 ) ; G = H . * F ; g = ifft2 ( G ) ; figure ; subplot ( 2 , 3 , 1 ) ; imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot ( 2 , 3 , 2) ; hn = h / max ( h ( : ) ) ; imshow (hn) ; title ( ‘ The Motion Filter ‘ ) ; subplot ( 2 , 3 , 3) ; imshow (g ) ; title ( ‘ Filtered Image ‘ ) ; subplot ( 2 , 3 ,4 ) ; imshow (abs ( F ) ) ; title ( ‘ Original Image ( FFT ) ‘ ) ; subplot ( 2 , 3 , 5 ) ; imshow (abs (H) ) ; title ( ‘ The Motion Filter (FFT) ‘ ) ; subplot ( 2 , 3 ,6 ) ; imshow (abs (G) ) ; title ( ‘ Filtered Image ( FFT ) ‘ ) ;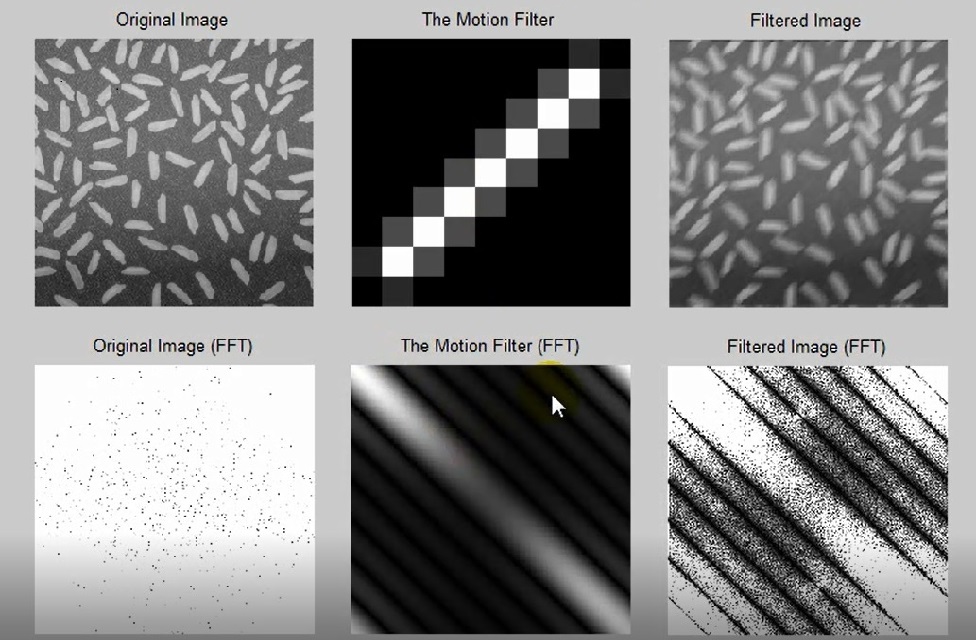
Original Image * The Motion Filter = Filtered Image
-
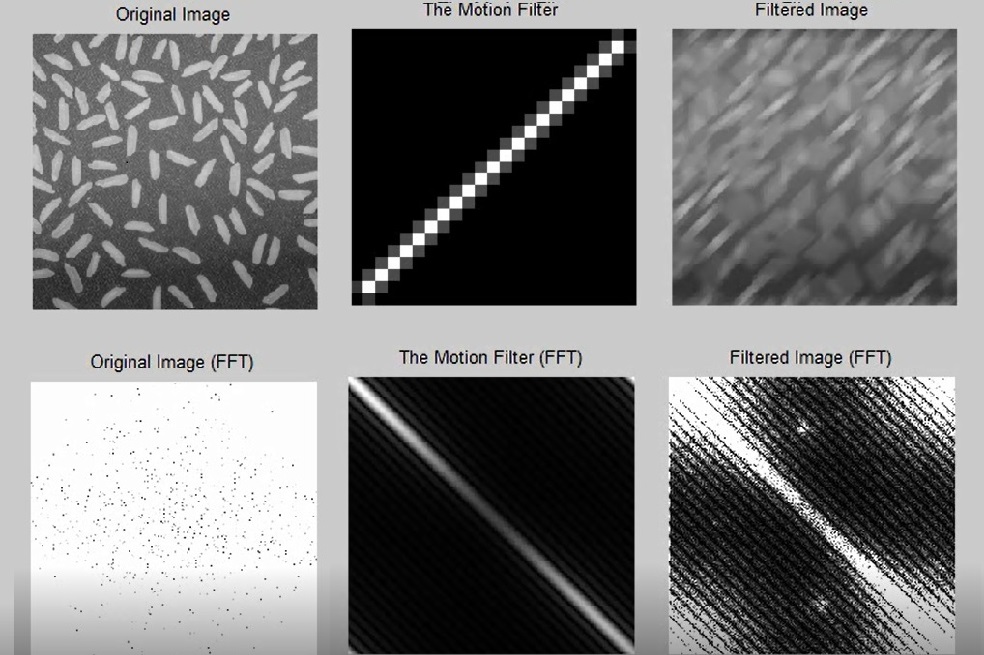
f = imread ( ‘ rice . png ‘ ) ; f = im2double ( f ) ; h = fspecial ( ‘ motion ‘ , 30 , 45 ) ; H1 = freqz2 ( h , size ( f , 1 ) , size ( f , 2 ) ) ; H = ifftshift ( H1 ) ;
فقط با تغییر دادن دامنه تغییرات تصویر را ببینیم :
نمایش شکل فیلترهای فرکانسی در حوزه فرکانس :
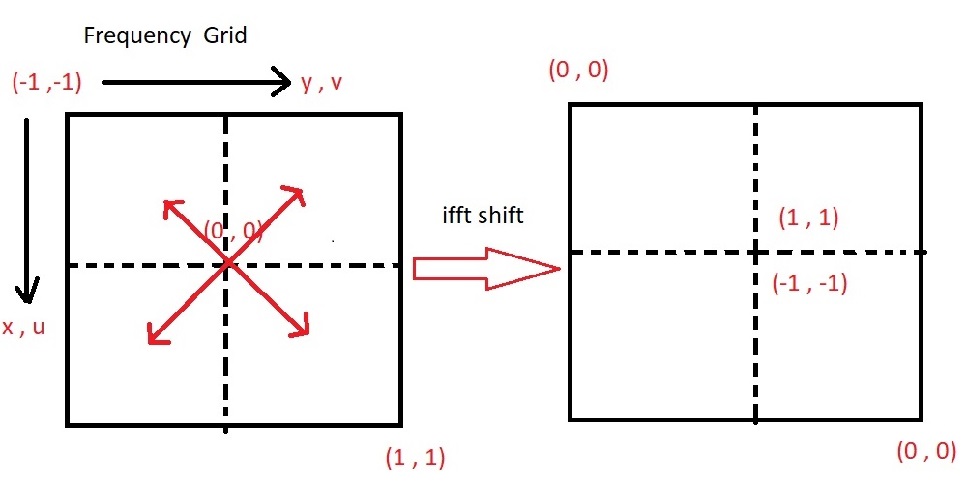
تشکیل شبکه تازه در u , v :
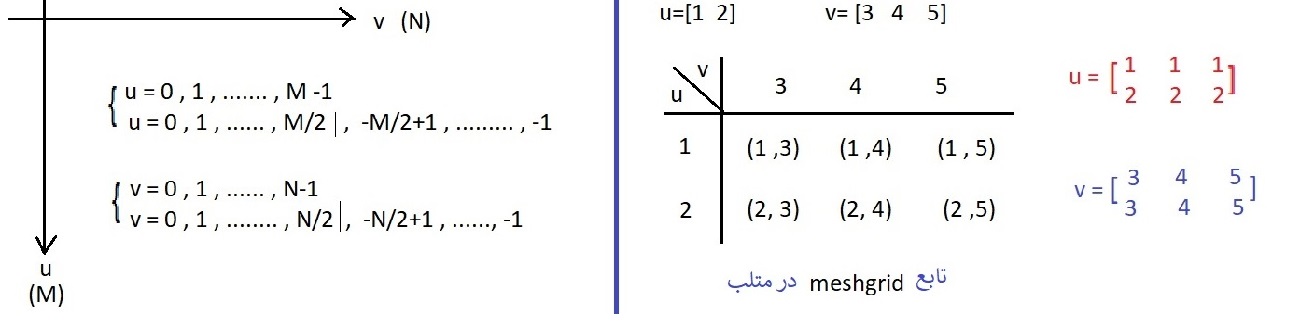
-
Function [u v] = CreateFreqGrid (M , N) U = 0 : M-1 ; U( u > M/2 ) = u ( u > M/2 ) – M ; V = 0 : N – 1 ; V (V > N/2 ) = V ( V > N/2 ) – N ; [ U V ] = meshgrid ( U , V ) ; end
کسب پاسخ فرکانسی با جدول فرکانسی
فیلتر در حوزه فرکانس :
-
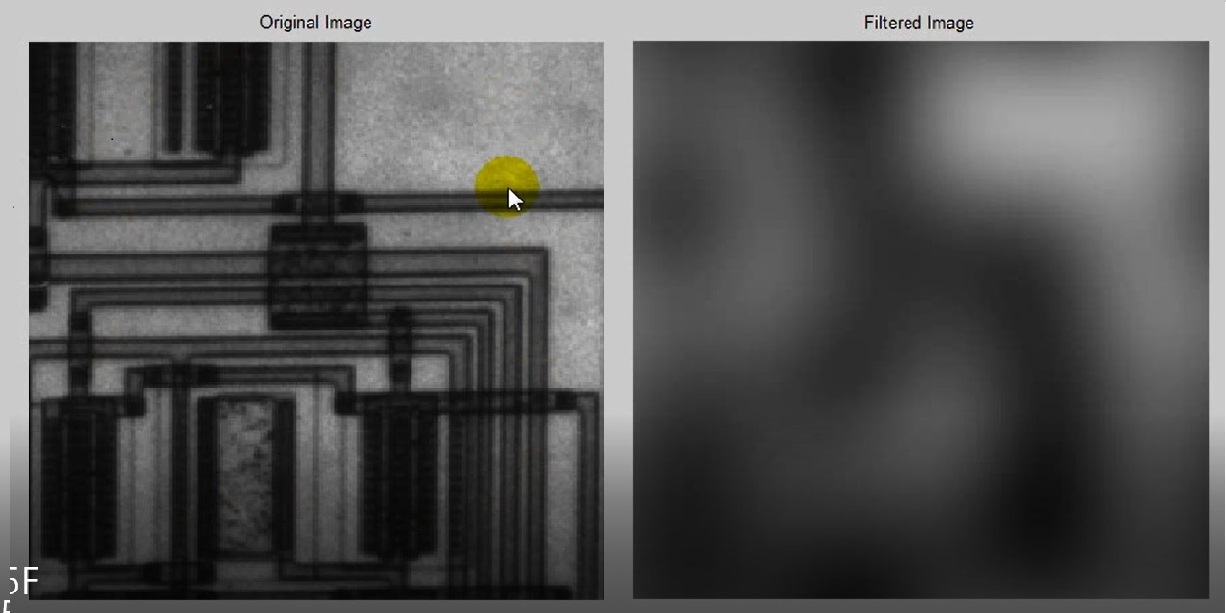
Clc ; Clear ; Close all ; % Read Image f = imread ( ‘ Circuit . tif ‘ ) ; f = im2double ( f ) ; F = fft2 (f) ; % Define Filter d0 = 3 ; HLP= @ (d) double ( d< = d0 ) ; % Imp Lement Filter [ U V ] = Create Freq Grid ( size ( f , 1 ) , size ( f , 2 ) ) ; D = sqrt ( U . ^2 + V . ^2 ) ; H = HLP ( D ) ; % Apply Filter G = H . * F ; g= ifft2 ( G ) ; % Show Results Figure ; subplot (1, 2, 1 ) ; imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot (1, 2, 2) ; imshow (g) ; title ( ‘ Filtered Image ‘ ) ;
پهنای باند را اضافه میکنیم میشود :
-
% Define Filter d0 = 10 ; HLP= @ (d) double ( d< = d0 ) ;
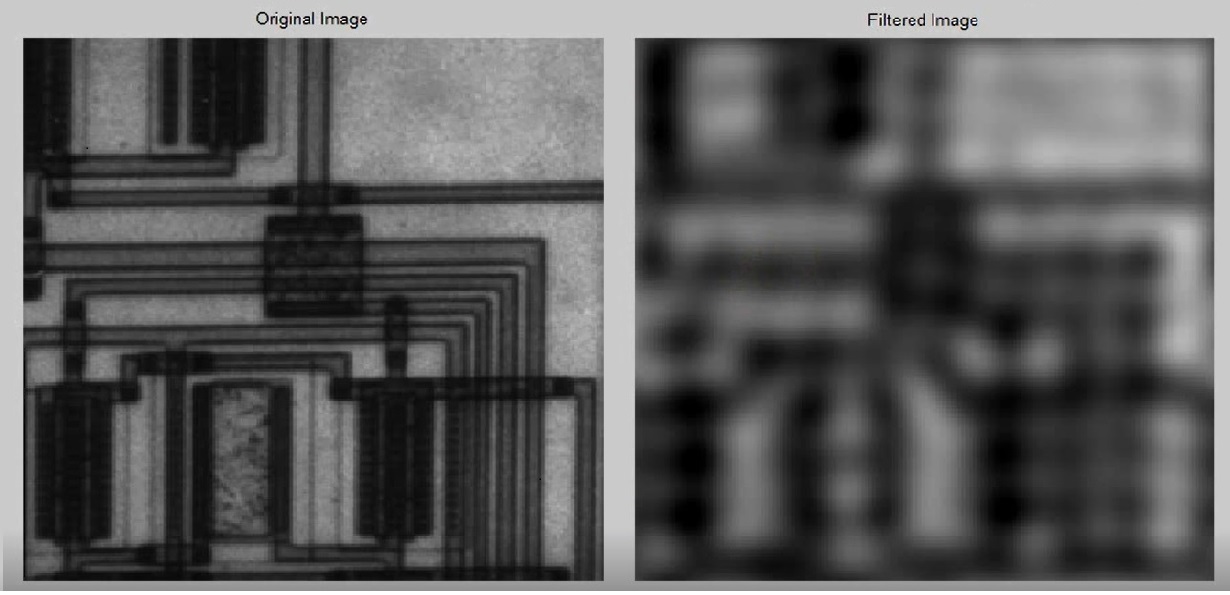
با افزودن پهنای باند وضوح تصویر بیشتر میشود .
تابع را با فاصله از مبدا بررسی میکنیم .
-
Function [g G] = Apply Freq Filter (f , HF) F = fft2 (f) ; [U V] = Create Freq Grid ( size ( f , 1 ) , size ( f , 2 ) ) ; D = Sqrt ( U . ^2 + V. ^2 ) ; H = HF ( D ) ; G = H . *F ; g = ifft2 (G) end Clc ; Clear ; Close all ; % Read Image f = imread ( ‘ Circuit . tif ‘ ) ; f = im2double ( f ) ; % Define Filter d0 = 50 ; HLP= @ (d) double ( d< = d0 ) ; % Imp Lement Filter [g G] = = Apply Freq Filter (f , HLP) ; % Show Results Figure ; subplot (1, 2, 1 ) ; imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot (1, 2, 2) ; imshow (g) ; title ( ‘ Filtered Image ‘ ) ;
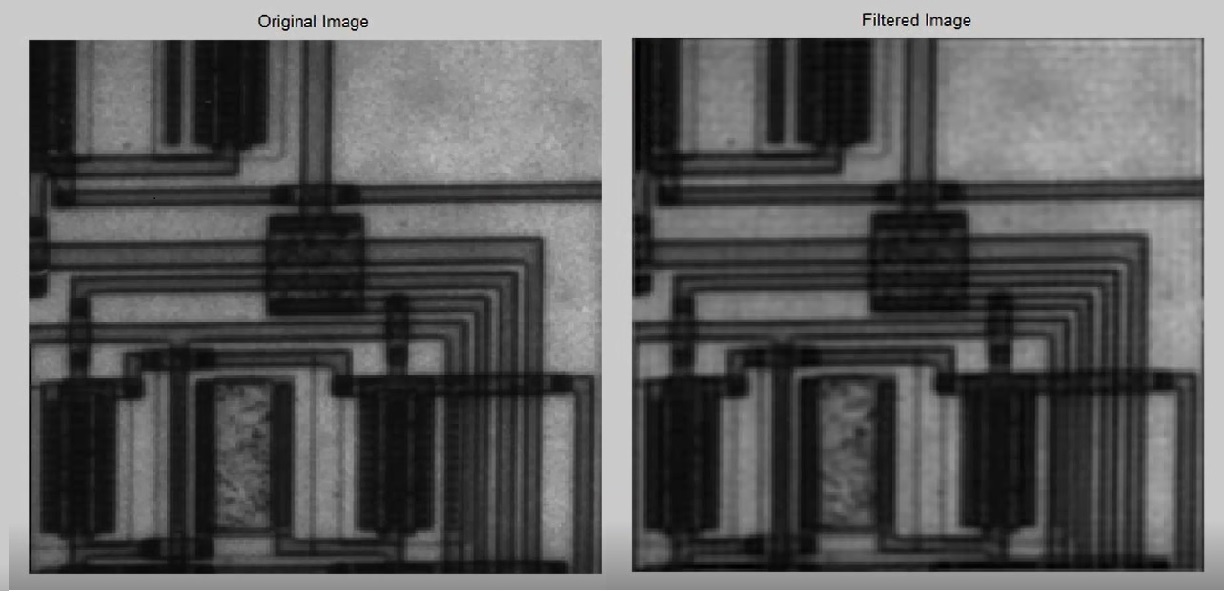
فاصله از مبدا تابع را خودکار انجام میدهد .
-
Clc ; Clear ; Close all ; % Read Image f = imread ( ‘ rice . png ‘ ) ; f = im2double ( f ) ; % Define Filter HLP= @ (d) double ( d< = 20) ; HHP= @ (d) double ( d> = 20) ; HBP= @ (d) double ( d> =10 & d< = 30 ) ; % Imp Lement Filter [g1 G1] = Apply Freq Filter ( f , HLP ) ; [g2 G2] = Apply Freq Filter ( f , HHP ) ; [g3 G3] = Apply Freq Filter ( f , HBP ) ; % Adjust Results g1 = imadjust ( g1 ) ; g2 = imadjust ( g2 ) ; g3 = imadjust ( g3 ) ; % Show Results Figure ; subplot (2, 2, 1 ) ; imshow ( f ) ; title ( ‘ Original Image ‘ ) subplot (2, 2, 2) ; imshow (g1) ; title ( ‘ LOW – Pass Filter ‘ ) ; subplot (2, 2,3) ; imshow (g2) ; title ( ‘ High – Pass Filter ‘ ) ; subplot (2, 2,4) ; imshow (g3) ; title ( ‘Band – Pass Filter ‘ ) ;
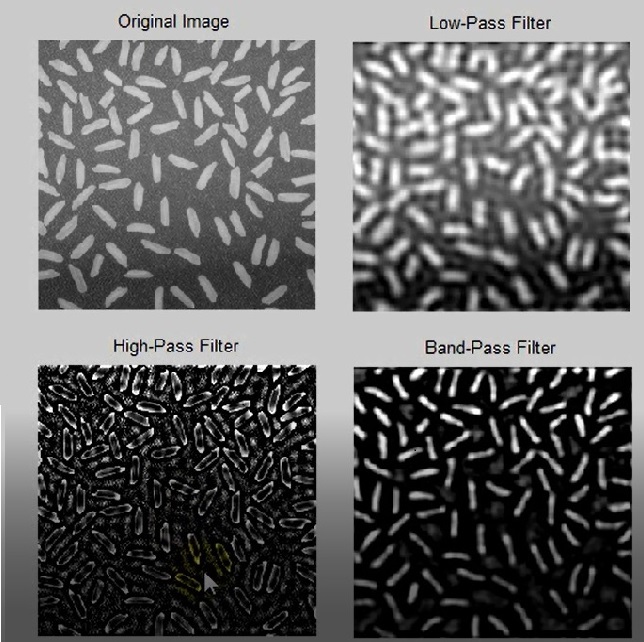
فیلتر پایین گذر تصویر را تار میکند .
از این قابلیتها برای طراحی سیستمهای پلاک خوان و اتوماسیون پارکینگ و همچنین نرم افزار پارکینگ استفاده میشود.
فیلتر بالا گذر حواشی و تغییرات رنگ را بهتر نمایان میکند .
-
% Read Image f = imread ( ‘ rice . png ‘ ) ; f = im2double ( f ) ; f = f ( 1 : 64 , 1 : 64 ) ; % Define Filters norder = 1 ; d0 = 5 ; w = 5 ; HLP= @ (d) 1 . / ( 1 + ( d ./d0 ) . ^(2*norder ) ) ; HHP= @ (d) 1 . / ( 1 + ( d ./d0 ) . ^(2*norder ) ) ; HBP= @ (d) 1 . / ( 1 + ( ( d . ^2 – d0 ^2) . / (w* d ) ) . ^ ( 2 * norder )
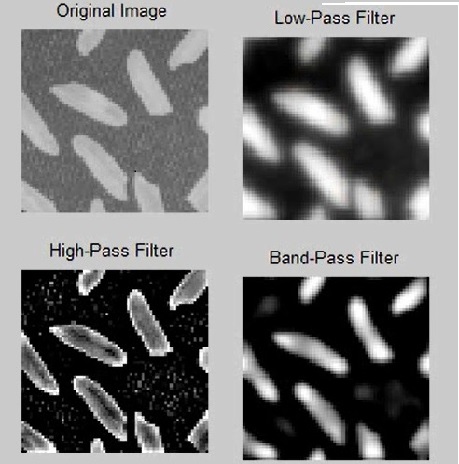
عبور دادن بخشی از اطلاعات تصویر تصاویر متفاوتی حاصل میکند .
پهنای باند در فیلتر میان گذر تصاویر خاصی را نمایش میدهد .
با تغییر فیلترها تصاویر و رفتارهای متنوعی به دست میاوریم .
انواع متریک ها :
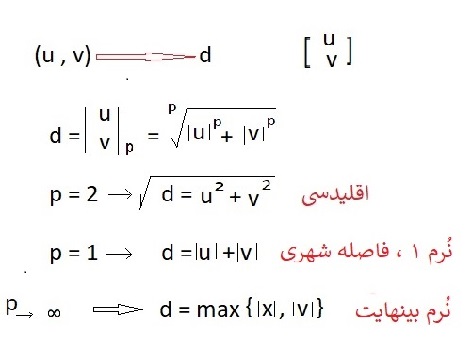
متریک ضرایب مکانی در متلب برای یافتن نواحی تکرار شده تصویر کارایی دارد .
بردار را از روی تصویر میسازیم هر بردار با خودش بیشترین مطابقت را دارد .
تطابق دو بردار از نظر ریاضی :
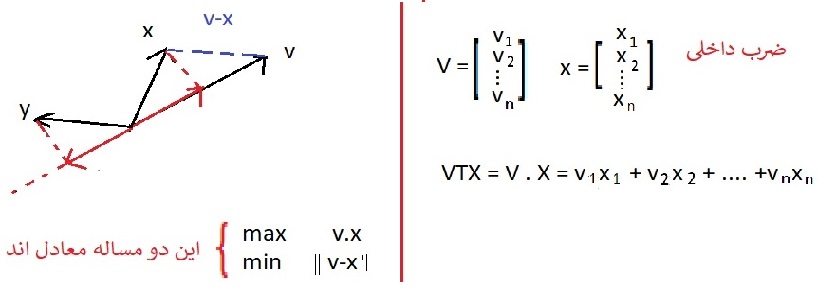
بهترین وسیله توصیف مقایسه و شباهت دو بردار ضرب داخلی است که مستقل از اسکیل است .
کار ماتریس ضرایب فیلتر مکانی در متلب تشخیص و شناسایی ضریب وزنی است .
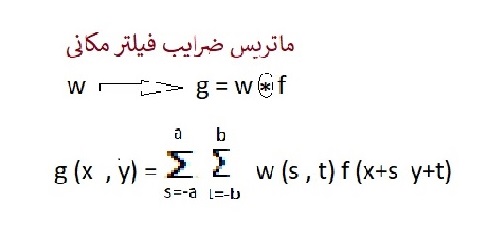
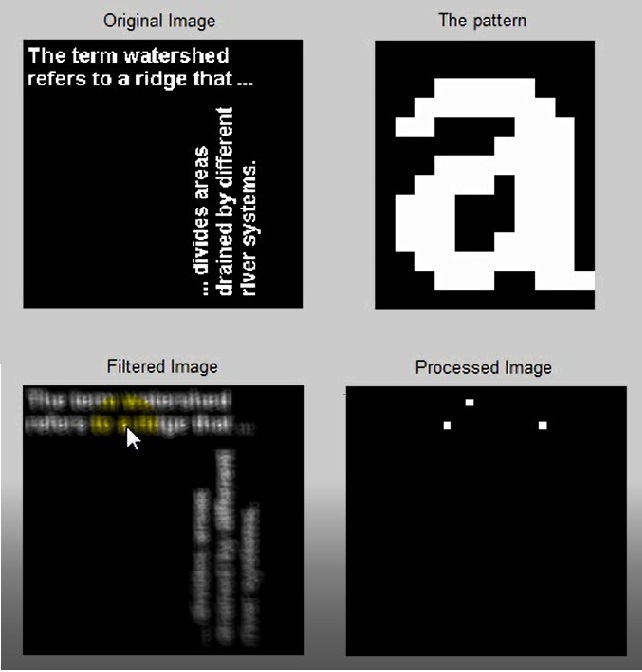
بررسی نقطه های روشن در تصویر g میزان سیملارتی راتشخیص میدهیم .
چند نمونه مثال :
-
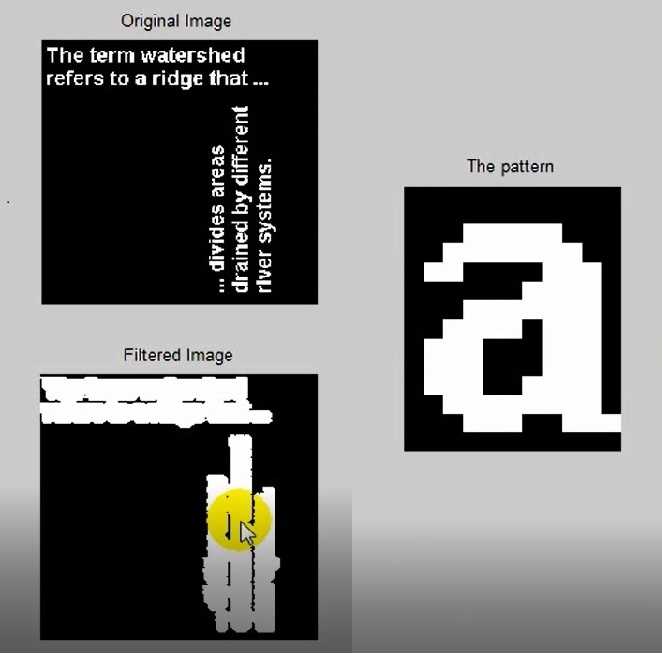
>> im show ( ‘ text . png ‘ ) >> f = imread ( ‘ text . png ‘ ) >> a = f ( 32:45 , 88:98 ) ; >> imshow (a)

-
Clc ; Clear ; Close all ; f= imread ( ‘ text . png ‘ ) ; f= im2double ( f ) ; a= f ( 32:45 , 88:98 ) ; g= imfilter ( f , a , ‘ circular ‘ ) ; figure ; subplot ( 2 , 2 , 1 ) imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot ( 2 , 2 , 2) imshow ( a ) ; title ( ‘ The pattern ‘ ) ; subplot ( 2 , 2 , 3) imshow ( g ) ; title ( ‘Filtered Image ‘ ) ;
-
Clc ; Clear ; Close all ; f= imread ( ‘ text . png ‘ ) ; f= im2double ( f ) ; a= f ( 32:45 , 88:98 ) ; a = a/sum ( a ( : ) ) ; g= imfilter ( f , a , ‘ circular ‘ ) ; g max = max ( g (:) ) ; th = 60 ; g2 = double ( g > = th ) ; g = g /max ( g ( : ) ) ; h = fspecial ( ‘ average ‘ , 7 ) ; g3 = imfilter ( g2 , h ) ; g3 = double ( g3 > 0 ) ; figure ; subplot ( 2 , 2 , 1 ) imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot ( 2 , 2 , 2) imshow ( a ) ; title ( ‘ The pattern ‘ ) ; subplot ( 2 , 2 , 3) imshow ( g ) ; title ( ‘Filtered Image ‘ ) ; subplot ( 2 , 2 ,4) imshow ( g2 ) ; title ( ‘ Processed Image ‘ ) ;
-
Clc ; Clear ; Close all ; f= imread ( ‘ text . png ‘ ) ; f= im2double ( f ) ; F = fft2 ( f ) ; a0 = f ( 32:45 , 88:98 ) ; A0 = fft2 (a0 , size ( f , 1 ) , size ( f , 2 ) ) ; a1 = rot 90 (a0 , 1 ) ; A1 = fft2 (a1 , size ( f , 1 ) , size ( f , 2 ) ) ; a2 = rot 90 (a0 , 2) ; A2 = fft2 (a2 , size ( f , 1 ) , size ( f , 2 ) ) ; a3 = rot 90 (a0 , 3) ; A3 = fft2 (a3 , size ( f , 1 ) , size ( f , 2 ) ) ; G0 = A0 . * F ; g0 = real (ifft2 ( G0 ) ) ; G1 = A1 . * F ; g1 = real (ifft2 ( G1 ) ) ; G2 = A2 . * F ; g2 = real (ifft2 ( G2 ) ) ; G3 = A3 . * F ; g3 = real (ifft2 ( G3 ) ) ; g = g0 ; g = max ( g , g1 ) g = max ( g , g2 ) g = max ( g , g3 ) th = 60 ; g2 = double ( g > = th ) ; g = g / max ( g ( : ) ) ; h = fspecial ( ‘ average ‘ , 7 ) ; g3 = imfilter ( g2 , h ) ; g3 = double ( g3 > 0 ) ; figure ; subplot ( 2 , 2 , 1 ) imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot ( 2 , 2 , 2) imshow ( a0 ) ; title ( ‘ The pattern ‘ ) ; subplot ( 2 , 2 , 3) imshow ( g ) ; title ( ‘Filtered Image ‘ ) ; subplot ( 2 , 2 ,4) imshow ( g3 ) ; title ( ‘ Processed Image ‘ ) ;
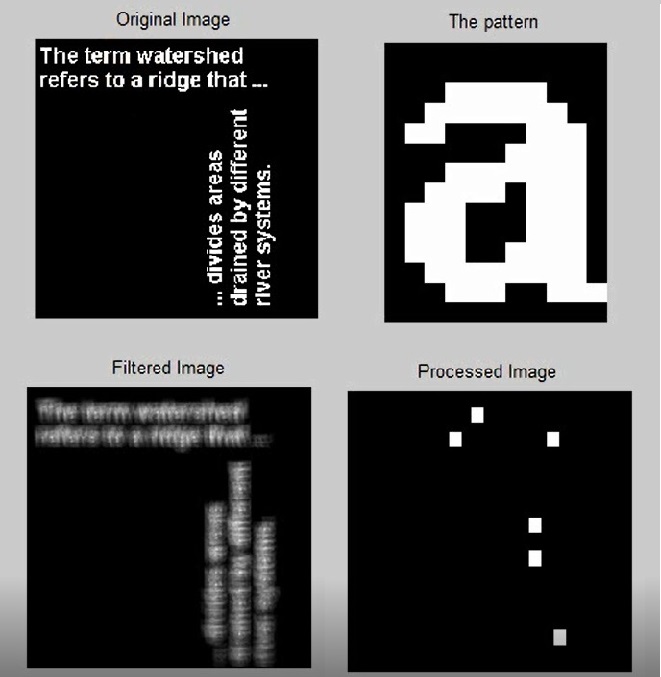
شناسایی 3 تصویر a در افق و عمود .
-
Clc ; Clear ; Close all ; f= imread ( ‘ text . png ‘ ) ; G3 = A3 . * F ; g3 = real (ifft2 ( G3 ) ) ; g = g0 ; g = max ( g , g1 ) g = max ( g , g2 ) g = max ( g , g3 ) th = 60 ; h= double ( g > = th ) ; for i= 1 : size ( h , 1 ) for j = 1 : size ( h , 2 ) if h ( i, j ) = 1 h ( (i– 13 ) : i, ( j – 10 ) : j ) = 1 ; end figure ; subplot ( 2 , 2 , 1 ) imshow ( f ) ; title ( ‘ Original Image ‘ ) ; subplot ( 2 , 2 , 2) imshow ( a0 ) ; title ( ‘ The pattern ‘ ) ; subplot ( 2 , 2 , 3) imshow ( g ) ; title ( ‘Filtered Image ‘ ) ; subplot ( 2 , 2 ,4) imshow (h) ; title ( ‘ Processed Image ‘ ) ; figure ; RGB ( : , : , 1 ) = double (Xor ( f , h ) ) ; RGB ( : , : , 2) = f ; RGB ( : , : , 3) = f ; Imsh0w ( RGB ) ;
اجرا شدن کُریلیشن در حوزه های فیلتری مکان و فرکانس .
فیلتر کُریلیشن الگوهای ثابت را در تصویر شناسایی میکند اما در برابر عواملی مثل نویز و دوران های غیر صحیح و بزرگ و کوچک شدن مقاوم نیست .
اساس تشخیص در متلب ضرب داخلی است .
ادامه در مبحث 11
